






















































Key points
- University of Sydney PhD student Guy Coleman has created a low cost weed detector
- Called OWL, for the OpenWeedLocator, it is for site-specific weed control in fallow
- The details for making OWL – from the 3D printable components to the algorithms needed – are all freely available online
- This aligns with an ethos for open-source data and hardware to improve weed detection
When Guy Coleman began his weed technology journey in 2018 as a precision weed control scientist in Narrabri, he had no coding or machine-learning experience.
In a few short years he has gained enough knowledge to start a PhD with the University of Sydney, win a Fulbright Scholarship to Texas A&M University, and release a low-cost, simple and open-source, site-specific weed detector.
In many ways Mr Coleman’s journey mirrors the quick pace of many developments in the weed technology space. “Five years ago, a lot of the algorithms and hardware that we are using now did not exist. Advances can occur rapidly,” he says.
The OWL
Mr Coleman released OWL, the OpenWeedLocator, in August as part of his PhD.
OWL is an image-based green-on-brown weed detector for site-specific weed control in fallow.
The details for making OWL – from the 3D printable components to the algorithms needed – are all freely available online. And by using off-the-shelf componentry, very simple green-detection algorithms and entirely 3D printable parts, Mr Coleman says it can be built for about $400.
It works by integrating weed detection on a Raspberry Pi, a low-cost credit-card sized computer, with a relay control board in a custom-designed case. This means it can attach any 12 Volt solenoid, relay, lightbulb or device for weed control.
Mr Coleman says OWL includes a range of colour-based algorithms for fallow weed detection, which have all been tested in a range of conditions around Wagga Wagga and Sydney in NSW.
It has been mounted on both robots and vehicles for spot spraying and it is attracting attention in Australia and overseas.
“Growers in Condamine, Dirranbandi, the Eyre Peninsula, Geraldton, and Victoria have contacted me about building them. I’ve also had interest from overseas as well and NSW Local Land Services have built some, as well as a colleague in the US and a robotics group in Victoria.”
As part of its development and testing, Mr Coleman and the OWL team designed and assembled a two-metre spot spraying boom, using two OWLs, with each controlling four 12V solenoids.
The boom was mounted on the back of a ute with the spray tank located in the tray and powered by a 12V car battery.
Across seven fallow fields with varying lighting and stubble conditions, the OWL was able to find 52 per cent of the weeds (called recall), and correctly trigger 79 per cent of the time, (called precision).
In individual transects, precision and recall values were up to 92 per cent and 74 per cent, respectively.
Mr Coleman says this shows the highly variable performance of the colour-only weed detection method used. “This method does not involve any machine learning and these results are just a starting point. Colour detection is fairly fraught for reliable weed detection.”
He concedes that OWL is not the same quality as others on the market. “It is a bit slower, and the current colour-only algorithms are variable in different conditions. But it is a great tool to get started with coding and technology. Growers can build a cheap spot sprayer just for green-on-brown detection and start to use an image-based weed detection system.
“Because it is open source, the idea is that the code can be changed, fixed or improved.
OWL represents an opportunity to redefine the approach to weed detection by enabling community-driven technology development and implementation in the weed control industry.”
Mr Coleman says making the OWL’s details freely available fits in with the ethos behind Weed-AI. Weed-AI is the open-source platform of annotated weed images developed by a team at the University of Sydney as part of a GRDC funded project led by associate professor Michael Walsh, who is also Mr Coleman’s PhD supervisor. (see separate story)
“Open-source software and hardware are driving forces in the machine learning community,” Mr Coleman says. “They are often described like ‘sharing a recipe’. Seeing that approach in agriculture would be of major benefit to food production and technological advancement.”
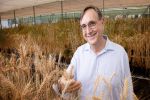
 University of Sydney PhD student Guy Coleman, who has spent much of 2021 in Texas as a Fulbright Scholar, has created a low cost weed detector. Supplied: Guy Coleman
University of Sydney PhD student Guy Coleman, who has spent much of 2021 in Texas as a Fulbright Scholar, has created a low cost weed detector. Supplied: Guy Coleman
Open-source approach
Weed detection technologies have three working parts, he explains: The images taken by a camera (the data), an algorithm that is trained on a large collection of images to identify a weed and a powerful but small computer to run it.
Computers need labelled images to work out which patterns represent weeds, but often lack data. “There are tonnes of data sets available for common objects, but not so many for weeds. This data has become important intellectual property and there is not much sharing. This is a shame because a lot of development in machine learning algorithms that are used today has only been possible because of open-source datasets.”
He says platforms like Weed-AI are key to addressing this gap. “Once the algorithm is trained on this image data, it can be run in real-time on the new images being streamed to it from the camera on the spray boom.
“But deep learning algorithms are data hungry. Effective operation in all conditions, with a variety of weeds and crops means large-scale datasets are needed that cover that variability.”
In a similar vein, camera-based Green-on-Green (GoG) spraying technology, while making substantial headway, is being held back by a lack of data. “lack of suitable data is the bottleneck.”
Mr Coleman has been focussed predominantly on machine learning in his PhD. “Specifically, I am focussing on weed recognition and crop-weed interaction. For example, how weeds look at different growth stages, what opportunities that leads to, the differences that occur over the lifecycle and what that may mean for weed control and in-crop weed detection.”
But owing much of his knowledge in machine learning and coding to open-source projects and courses online, he saw OWL as both contributing to this community and providing a practical tool for weed control.
Future
Mr Coleman says the future could see unexplored avenues, like weed growth stages, investigated. “Targeting treatments to weed size and species are some of these ideas I’m trying to work out. It’s a new field with lots of questions yet to be explored on the data, algorithm and field-testing fronts.”
However, it is important to stay grounded. “In the age of agtech, big promises and awesome opportunities, it is easy to be drawn into the excitement of new technology, losing sight of the grower and their defining problem.
“Agriculture, as a biological industry, is environmentally diverse and ever-changing, meaning research projects should keep product application front of mind.”
Although Mr Coleman has always been a bit of a tinkerer, aided by time spent between Perth and the family farm in Esperance, he had originally intended to study medicine. Unfortunately for weeds, his passion for agriculture won out.
Mr Coleman returned to Australia in April to continue winter field trials.
More information:Guy Coleman, guy.coleman@sydney.edu.au, OpenWeedLocator (OWL): An open-source, low-cost device for fallow weed detection
Read more: Online gallery puts everyone in the weeds control picture.